智慧城市学院北斗+基础设施智能监测预警团队在导航定位顶刊发表组合导航最新研究成果
日期:2026-01-15作者:编辑:重庆智慧城市学院审核人:何荣波浏览量:

近日,重庆交通大学智慧城市学院北斗+基础设施智能监测预警团队以“Cascaded Transformer-LSTM Architecture for Urban Canyon Navigation with Factor Graph Optimization”(用于城市峡谷导航的级联Transformer-LSTM架构及因子图优化)为题,在卫星导航领域顶刊《GPS Solutions》(中科院一区Top)发表研究论文,我院教师张桓博士、研究生罗文燚等为论文共同作者。
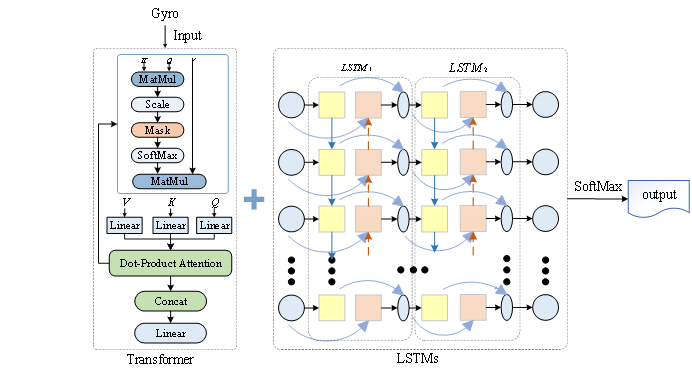
图1 Transformer-LSTM结构图
随着智能交通系统的快速发展,高精度可靠的车辆导航已成为复杂城市环境下位置服务的核心需求。然而,在GNSS信号频繁中断和时变误差动态特性下,如何有效补偿惯性测量单元(IMU)的累积误差,捕捉精准的时空轨迹信息仍面临挑战。尽管深度学习为GNSS/INS组合导航提供了多种误差校正方案,但这些方案对复杂环境条件下误差特征的建模能力仍存在不足。该研究针对此难题,提出了一种结合级联Transformer-LSTM架构与因子图优化的融合定位方法,为在城市峡谷等复杂场景中实现鲁棒稳定的高精度导航提供了新的解决方案。
研究团队发现,尽管通过传统卡尔曼滤波能够补偿IMU的短期误差累积,但无法有效建模IMU的非线性误差特性以及GNSS信号中断期间的复杂动态变化,导致导航精度低、鲁棒性差。针对此,论文提出了两大核心模块:
(1)全局时序与局部残差融合模块:在对IMU陀螺仪数据进行线性变换、缩放等预处理操作后,使用Transformer网络来提取IMU数据的全局时序依赖关系,捕捉序列中不同位置间的关联性,然后使用长短期记忆网络(LSTM)来建模残差序列的局部非线性误差模式,深度挖掘时变误差特征。
(2)自适应协方差学习模块:为了能够更好量化IMU的误差不确定性,在因子图优化框架的基础上设计了一种数据驱动的协方差矩阵生成机制,来提升误差补偿系统的自适应能力。通过使用该模块能够增强Transformer对高频噪声的抑制能力,避免有效导航信息的丢失,同时使得LSTM网络能够对复杂的非线性误差实现更精准、更鲁棒的建模,从而能够从IMU测量中获取更可靠且更精确的状态估计。
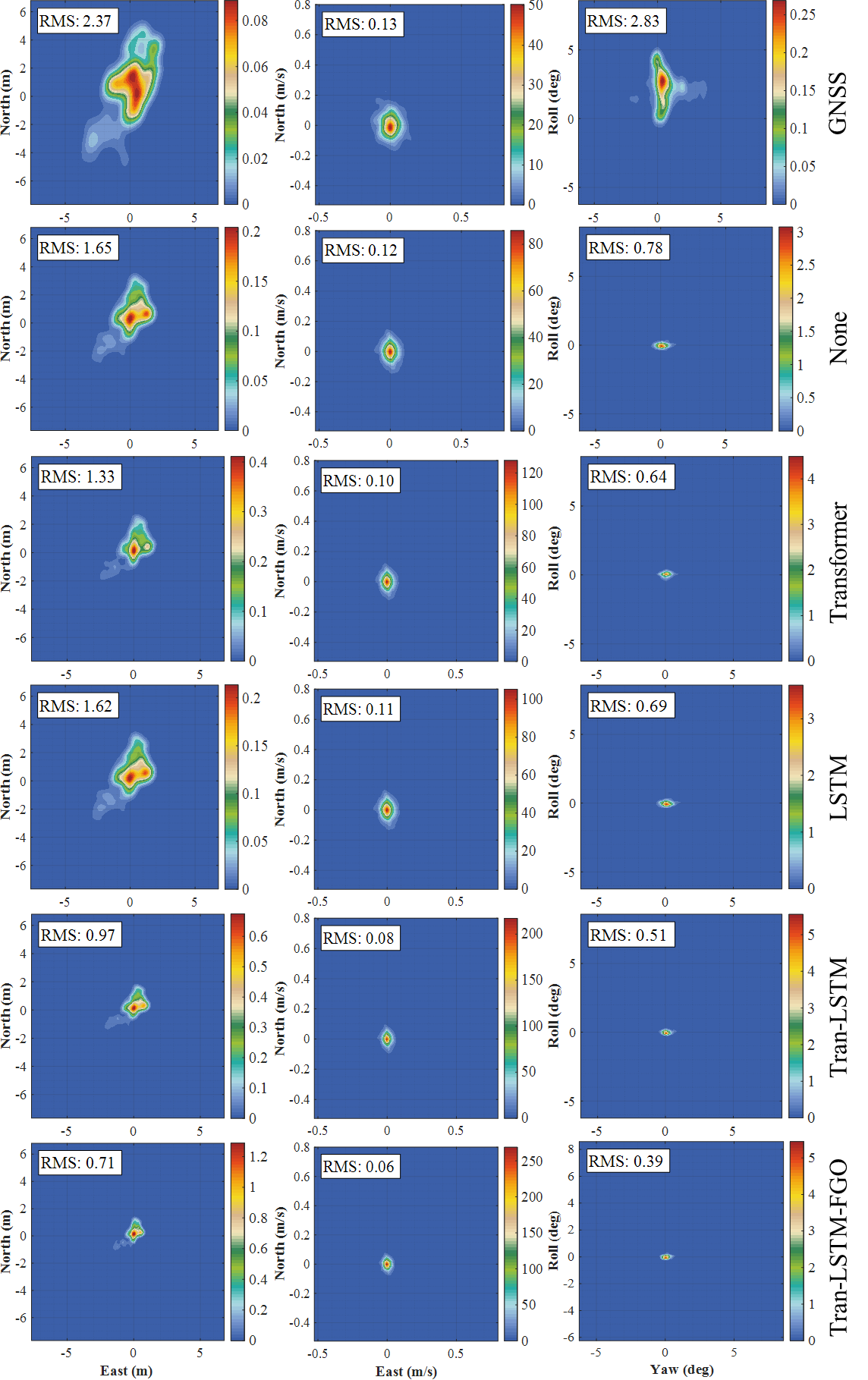
图2 各模型的误差分别及精度
本研究得到重庆市自然科学基金(CSTB2024NSCQ-MSX1095、CSTB2023NSCQ-LZX0122)、重庆市教委项目(KJQN202400708)等资助。
引用信息:Zhang, H., Luo, W.,et al., (2026). Cascaded transformer-LSTM architecture for urban canyon navigation with factor graph optimization.GPS Solutions,30(1), 55.
DOI:https://doi.org/10.1007/s10291-025-02010-8
论文链接:https://link.springer.com/article/10.1007/s10291-025-02010-8
【关闭】
